Mi az a szervo hajtás, szervo vezérlés. A készülék leírása és a szervohajtás működési elve Szervomotor vezérlés
Ez a cikk a szervókat tárgyalja: eszközüket, céljukat, szervovezérlést, szervocsatlakozást, szervótípusokat és azok összehasonlítását. Kezdjük azzal, hogy mi is az a szervo.
A szervó fogalma
A szervohajtáson leggyakrabban egy villanymotoros mechanizmust értünk, amelytől meg lehet kérni, hogy egy adott szögbe forduljon és tartsa ezt a pozíciót. Ez azonban nem teljes definíció.
Pontosabban fogalmazva, a szervohajtás negatív visszacsatoláson keresztül vezérelt hajtás, amely lehetővé teszi a mozgási paraméterek pontos szabályozását. A szervohajtás bármilyen típusú mechanikus hajtás, amely egy érzékelőt (helyzet, fordulatszám, erő stb.) és egy hajtásvezérlő egységet tartalmaz, amely adott külső értéknek megfelelően automatikusan karbantartja a szükséges paramétereket az érzékelőn és a készüléken.
Más szavakkal:
A szervohajtás bemenetként megkapja a vezérlőparaméter értékét. Például a forgásszög
A vezérlőegység összehasonlítja ezt az értéket az érzékelőjén lévő értékkel
Az összehasonlítás eredménye alapján a hajtás végrehajt valamilyen műveletet, például fordul, gyorsít vagy lassít, hogy a belső érzékelőből származó érték a lehető legközelebb legyen a külső vezérlőváltozó értékéhez.
A legelterjedtebbek az adott szöget tartó szervók és az adott forgási sebességet fenntartó szervók.
Az alábbiakban egy tipikus hobbi szervó látható.
Hogyan vannak elrendezve a szervók?
Szervo készülék
A szervohajtások több összetevőből állnak.

Hajtás - villanymotor sebességváltóval. Ahhoz, hogy az elektromosságot mechanikus forgássá alakítsa, szüksége van elektromos motor. A motor forgási sebessége azonban gyakran túl magas a gyakorlati használathoz. A sebesség lassítására szolgál csökkentő: forgatónyomatékot továbbító és átalakító fogaskerekes mechanizmus.
A villanymotor be- és kikapcsolásával forgathatjuk a kimenő tengelyt - a szervó végső fogaskerekét, amelyre ráerősíthetünk valamit, amit irányítani szeretnénk. Ahhoz azonban, hogy a pozíciót a készülék szabályozza, visszacsatoló érzékelő - kódoló, amely a kormányszöget elektromos jellé alakítja vissza. Ehhez gyakran használnak potenciométert. A potenciométer csúszka elforgatásakor az ellenállása a forgásszöggel arányosan változik. Így a mechanizmus aktuális helyzetének beállítására használható.
Az elektromos motoron, a sebességváltón és a potenciométeren kívül a szervohajtásnak van egy elektronikus feltöltése is, amely egy külső paraméter fogadásáért, a potenciométer értékeinek leolvasásáért, összehasonlításáért és a motor be- és kikapcsolásáért felelős. Ő felelős a negatív visszajelzések fenntartásáért.
Három vezeték megy a szervóhoz. Közülük kettő a motor táplálásáért felel, a harmadik pedig vezérlőjelet ad, amivel a készülék helyzetét állítják be.
Most nézzük meg, hogyan lehet külsőleg vezérelni a szervót.
Szervo vezérlés. Vezérlőjel interfész
A szervó kívánt pozíciójának jelzéséhez vezérlőjelet kell küldeni az erre szánt vezeték mentén. Vezérlőjel - állandó frekvenciájú és változó szélességű impulzusok.

A szervó pozíciója az impulzusok hosszától függ. Amikor egy jel belép a vezérlőáramkörbe, a benne lévő impulzusgenerátor saját impulzust állít elő, amelynek időtartamát potenciométeren keresztül határozzuk meg. Az áramkör egy másik része összehasonlítja a két impulzus időtartamát. Ha az időtartam eltérő, az elektromos motor be van kapcsolva. A forgásirányt az határozza meg, hogy melyik impulzus rövidebb. Ha az impulzusok hossza egyenlő, az elektromos motor leáll.
Leggyakrabban a hobbi szervókban az impulzusokat 50 Hz-es frekvencián állítják elő. Ez azt jelenti, hogy 20 ms-onként egy impulzus kerül kibocsátásra és fogadásra. Általában az 1520 µs impulzus időtartama azt jelenti, hogy a szervónak a középső pozíciót kell felvennie. Az impulzus hosszának növelése vagy csökkentése azt eredményezi, hogy a szervo az óramutató járásával megegyezően vagy azzal ellentétes irányban forog. Ebben az esetben az impulzus időtartamának felső és alsó határa van. Az Arduino Servo könyvtárában az alapértelmezett impulzushosszok 544 µs 0°-hoz és 2400 µs 180°-hoz.
Kérjük, vegye figyelembe, hogy az Ön készülékén a gyári beállítások eltérhetnek a szabványos beállításoktól. Egyes szervók 760 µs impulzusszélességet használnak. Ebben az esetben a középső pozíció 760 µs-nak felel meg, ugyanúgy, mint a hagyományos szervohajtásoknál, az átlagos pozíció 1520 µs-nak felel meg.
Azt is érdemes megjegyezni, hogy ezek csak általánosan elfogadott hosszúságok. Még ugyanazon szervo modellen belül is előfordulhat olyan gyártási hiba, amely miatt az impulzushosszak működési tartománya kissé eltér. A pontos működéshez minden egyes szervót kalibrálni kell: kísérletekkel kell kiválasztani a rá jellemző tartományt.
Amire még érdemes odafigyelni, az a terminológiai zavar. A szervók vezérlésének módját gyakran PWM / PWM-nek (impulzusszélesség-moduláció) vagy PPM-nek (impulzushelyzet-modulációnak) nevezik. Ez nem így van, és ezen módszerek használata akár a meghajtó károsodását is okozhatja. A helyes kifejezés a PDM (Pulse Duration Modulation). Ebben rendkívül fontos az impulzusok hossza, és nem olyan fontos a megjelenésük gyakorisága. Az 50 Hz a norma, de a szervo 40 és 60 Hz-en is megfelelően működik. Csak azt kell szem előtt tartani, hogy erős frekvenciacsökkenéssel rándulással és csökkentett teljesítménnyel tud működni, erős frekvencianövekedéssel (például 100 Hz) pedig túlmelegedhet és meghibásodhat.
A szervó specifikációi
Most nézzük meg, mik a szervók, és milyen jellemzőkkel rendelkeznek.
Nyomaték és fordulási sebesség
Először is beszéljünk a szervó két nagyon fontos jellemzőjéről: nyomatékés róla fordulási sebesség.
Az erőnyomaték vagy a nyomaték egy vektorfizikai mennyiség, amely megegyezik a forgástengelytől az erő vektora által az erő alkalmazási pontjáig húzott sugárvektor szorzatával. A merev testre ható erő forgó hatását jellemzi.

Egyszerűen fogalmazva, ez a jellemző megmutatja, hogy a szervó milyen nagy terhelést tud nyugalomban tartani egy adott hosszúságú karon. Ha a szervó forgatónyomatéka 5 kg × cm, akkor ez azt jelenti, hogy a szervó egy 1 cm hosszú kart tart a súlyon vízszintes helyzetben, aminek a szabad végére 5 kg van akasztva. Illetve egy 5 cm hosszú kar, amelyre 1 kg akasztanak fel.
A szervó sebességét a szervokar 60°-os elforgatásához szükséges idő alatt mérjük. A 0,1s/60°-os karakterisztika azt jelenti, hogy a szervo 0,1s alatt 60°-ot fordul el. Ebből könnyen kiszámítható a fordulatszám ismertebb értékben, fordulat per perc, de előfordult, hogy a szervók leírásánál leggyakrabban ilyen mértékegységet használnak.
Érdemes megjegyezni, hogy e két jellemző között néha kompromisszumot kell kötni, hiszen ha megbízható, nagy teherbírású szervót akarunk, akkor fel kell készülni arra, hogy ez a hatalmas szerelék lassan forog. Ha pedig nagyon gyors hajtást akarunk, akkor azt viszonylag könnyű lesz kiegyensúlyozni. Ugyanazon motor használata esetén az egyensúlyt a sebességváltóban lévő fogaskerekek konfigurációja határozza meg.
Természetesen mindig vehetünk nagyobb áramot fogyasztó üzemet, amennyiben a tulajdonságai megfelelnek az igényeinknek.
Formafaktor
A szervók különböző méretűek. És bár nincs hivatalos besorolás, a gyártók régóta ragaszkodnak több mérethez a rögzítőelemek általánosan elfogadott elrendezésével. A következőkre oszthatók:
kicsi
alapértelmezett
A következő jellemző méretekkel rendelkeznek:
Vannak úgynevezett „speciális típusú” szervók is, amelyek méretei nem tartoznak ebbe a besorolásba, de az ilyen szervók aránya nagyon kicsi.
Belső interfész
A szervo meghajtók analógok vagy digitálisak. Tehát mik a különbségek, előnyei és hátrányai?
Külsőleg nem különböznek egymástól: a villanymotorok, a sebességváltók, a potenciométerek ugyanazok, csak a belső vezérlőelektronikában különböznek egymástól. Egy speciális analóg szervóchip helyett a digitális megfelelője egy impulzusokat fogadó, azokat elemző és a motort vezérlő mikroprocesszorral látja el a kártyán. Így a fizikai változatban csak az impulzusok feldolgozásában és a motor vezérlésében van a különbség.

Mindkét típusú szervó ugyanazokat a vezérlőimpulzusokat veszi fel. Az analóg szervo ezután eldönti, hogy módosítja-e a pozíciót, és szükség esetén jelet küld a motornak. Ez általában 50 Hz-es frekvencián történik. Így 20 ms-ot kapunk - a minimális reakcióidőt. Ekkor bármilyen külső hatás megváltoztathatja a szervó helyzetét. De nem ez az egyetlen probléma. Nyugalmi állapotban a villanymotor nem kap feszültséget, az egyensúlyi állapottól való enyhe eltérés esetén kis teljesítményű rövid jelet kap a villanymotor. Minél nagyobb az eltérés, annál erősebb a jel. Így kis eltérések esetén a szervo nem tudja gyorsan forgatni a motort vagy nagy nyomatékot fejleszteni. A "holt zónák" időben és távolságban alakulnak ki.
Ezeket a problémákat a vételi frekvencia, a jelfeldolgozás és a motorvezérlés növelésével lehet megoldani. A digitális szervók egy speciális processzort használnak, amely vezérlőimpulzusokat fogad, feldolgoz, és jeleket küld a motornak 200 Hz-es vagy annál nagyobb frekvencián. Kiderült, hogy a digitális szervo gyorsabban tud reagálni a külső hatásokra, gyorsabban fejleszti a szükséges fordulatszámot és nyomatékot, vagyis jobb egy adott pozíciót tartani, ami jó. Természetesen ugyanakkor több áramot fogyaszt. Ezenkívül a digitális szervókat nehezebb gyártani, ezért észrevehetően drágábbak. Valójában ez a két hátrány a digitális szervók hátránya. Technikai értelemben feltétel nélkül legyőzik az analóg szervókat.
A felszerelés anyagai
A szervók fogaskerekei többféle anyagból készülnek: műanyag, szén, fém. Mindegyiket széles körben használják, a választás az adott feladattól és attól függ, hogy milyen jellemzőkre van szükség a telepítéshez.

A műanyag, leggyakrabban nejlon fogaskerekek nagyon könnyűek, nem kopnak, és leggyakrabban szervókban találhatók. Nem bírják a nagy terhelést, de ha várhatóan kicsi a terhelés, akkor a nylon fogaskerekek a legjobb választás.
A karbon fogaskerekek tartósabbak, gyakorlatilag nem kopnak, és többszörösen erősebbek, mint a nejlonok. A fő hátrány a magas költség.
A fém fogaskerekek a legnehezebbek, de ellenállnak a maximális terhelésnek. Elég hamar elhasználódnak, így szinte minden szezonban váltót kell cserélni. A fém fogaskerekek közül a titán fogaskerekek a kedvencek, mind műszaki jellemzők, mind ár tekintetében. Sajnos elég sokba fognak kerülni.
Kefés és kefe nélküli motorok
Háromféle szervomotor létezik: hagyományos magmotor, mag nélküli motor és kefe nélküli motor.

A hagyományos magmotor (jobbra) sűrű vasrotorral rendelkezik, huzaltekercsekkel és körülötte mágnesekkel. A forgórész több részből áll, így a motor forgásakor a rotor enyhén rezeg a motorban, amikor a részek áthaladnak a mágneseken, ami egy rezgő szervót eredményez, amely kevésbé pontos, mint egy mag nélküli motor szervó. Az üreges rotoros motor (balra) egyetlen mágneses maggal rendelkezik, henger vagy harang alakú tekercseléssel a mágnes körül. A mag nélküli kialakítás kisebb súlyú, és nincsenek részei, ami gyorsabb reakciót és egyenletes, vibrációmentes működést eredményez. Ezek a motorok drágábbak, de magasabb szintű vezérlést, nyomatékot és fordulatszámot biztosítanak, mint a hagyományos motorok.

Viszonylag a közelmúltban jelentek meg a kefe nélküli motorral szerelt szervóhajtások. Az előnyök ugyanazok, mint a többi kefe nélküli motornál: nincsenek kefék, ami azt jelenti, hogy nem okoznak ellenállást a forgásnak és nem kopnak, a fordulatszám és a nyomaték nagyobb a kollektoros motorokéval megegyező áramfelvétel mellett. A kefe nélküli motorszervók a legdrágább szervók, de jobb teljesítményt nyújtanak, mint a más típusú motorokkal rendelkező szervók.
Csatlakozás Arduinohoz
Sok szervó közvetlenül csatlakoztatható az Arduino-hoz. Ehhez három vezetékből álló kábelből származnak:
piros - élelmiszer; csatlakozik az 5V-os érintkezőhöz vagy közvetlenül a tápegységhez
barna vagy fekete - föld
sárga vagy fehér - jel; csatlakozik az Arduino digitális kimenetéhez.
Az Arduino-hoz való csatlakozáshoz kényelmes lesz egy portbővítő kártya, például a Troyka Shield. Bár néhány extra vezetékkel a szervót a kenyérsütőlapon keresztül vagy közvetlenül az Arduino érintkezőihez csatlakoztathatja.
Lehetséges saját maga is generálni vezérlőimpulzusokat, de ez annyira gyakori feladat, hogy a Servo szabványkönyvtár egyszerűsítésére szolgál.
Élelmiszer korlátozás
Egy tipikus hobbi szervó 100 mA feletti áramot vesz fel működés közben. Ugyanakkor az Arduino akár 500 mA leadására is képes. Ezért, ha nagy teljesítményű szervót kell használnia egy projektben, érdemes megfontolni a további teljesítményű áramkörbe történő leválasztását.
Tekintsük a 12 V-os szervo csatlakoztatásának példáját: 
A csatlakoztatott szervók számának korlátozása
A legtöbb Arduino táblán a Servo könyvtár maximum 12 szervót támogat, az Arduino Mega esetében ez a szám 48-ra emelkedik. A könyvtár használatának van egy kis mellékhatása: ha nem Arduino Megával dolgozik, lehetetlenné válik használja az AnaWrite () funkciót 9 és 10 érintkezőkön, függetlenül attól, hogy a szervók csatlakoznak-e ezekhez a lábakhoz vagy sem. Az Arduino Megához akár 12 szervót is csatlakoztathatunk a PWM/PWM funkció feltörése nélkül, ha több szervót használunk, akkor a 11-es és 12-es érintkezőkön nem fogjuk tudni használni az AnaWrite()-t.
Szervo könyvtár funkció
A Szervo könyvtár lehetővé teszi a szervók szoftveres vezérlését. Ehhez létrejön egy Servo típusú változó. Az irányítást a következő funkciók végzik:
attach() – Változót csatol egy adott tűhöz. Ennek a függvénynek két szintaxisa lehetséges: servo.attach(pin) és servo.attach(pin, min, max) . Ebben az esetben a pin annak a tűnek a száma, amelyre a szervo csatlakozik, a min és max az impulzushosszak mikroszekundumban, amelyek a 0°-os és 180°-os elforgatási szögekért felelősek. Alapértelmezés szerint ezek 544 µs, illetve 2400 µs.
write() - utasítja a szervót, hogy fogadjon el valamilyen paraméterértéket. A szintaxis a következő: servo.write(angle), ahol a szög az a szög, amelyet a szervónak el kell fordítania.
writeMicroseconds() - parancsot ad egy bizonyos hosszúságú impulzus küldésére a szervónak, az előző parancs alacsony szintű analógja. A szintaxis a következő: servo.writeMicroseconds(uS), ahol uS az impulzus hossza mikroszekundumban.
read() - beolvassa a szervo szögének aktuális értékét. A szintaxis a következő: a servo.read() 0 és 180 közötti egész értéket ad vissza.
attach() - Ellenőrzi, hogy egy változót csatoltak-e egy adott tűhöz. A szintaxis a következő: a servo.attached() igaz logikai értéket ad vissza, ha a változót pinhez csatolták, vagy false értéket egyébként.
detach() - az attach() ellentétes műveletét hajtja végre, azaz leválasztja a változót a hozzárendelt tűről. A szintaxis: servo.detach() .
Minden Servo2 könyvtár metódus megegyezik a Servo metódusokkal.
Példa a Servo könyvtár használatára
Konklúzió helyett
A szervóhajtások különbözőek, egyesek jobbak - mások olcsóbbak, vannak megbízhatóbbak - mások pontosabbak. És mielőtt szervót vásárolna, ne feledje, hogy nem biztos, hogy a legjobb tulajdonságokkal rendelkezik, mindaddig, amíg megfelel az Ön projektjének. Sok sikert a törekvéseidhez!
Ebben a cikkben megvizsgáljuk a szervók eszközét, működési elvét, jellemzőit és általános méreteit.
A szervo hajtás definíciója
A szervohajtás (követő hajtás) negatív visszacsatoláson keresztül vezérelhető hajtás, amely lehetővé teszi a mozgási paraméterek pontos szabályozását.
A szervohajtás bármilyen típusú mechanikus hajtás (eszköz, munkatest), amely egy érzékelőt (helyzet, sebesség, erőkifejtés stb.) és egy hajtásvezérlő egységet (elektronikus áramkör vagy mechanikus összekötő rendszer) tartalmaz, amely automatikusan fenntartja a szükséges paramétereket a készüléken. érzékelő (illetve a készüléken) a beállított külső értéknek megfelelően (a vezérlőgomb helyzete vagy más rendszerek számértéke).
Egyszerűen fogalmazva, a szervohajtás egy „automatikus precíz végrehajtó” – egy vezérlőparaméter értékét bemenetként kapva (valós időben) „önmagában” (az érzékelő leolvasásai alapján) igyekszik létrehozni és fenntartani ezt az értéket az aktuátor kimenete.

Felhasznált alkatrészek (Kínából vásárolva):
Hasznos dolog a szervók ellenőrzéséhez
Miután foglalkoztunk a definícióval, térjünk át a szervo működési elvének közvetlen elemzésére
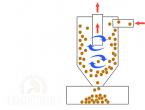
A nagyobb áttekinthetőség kedvéért azonnal adok egy sematikus képet a szervó belsejéről.

Térjünk rá az elemzésre.
A szervóról a vezérlőhöz való csatlakozáshoz 3 vezetéket kell kihúzni, leggyakrabban egy szabványos, 2,54 mm-es osztású 3 tűs csatlakozóval préselve (1). A vezetékek színe eltérő lehet. Barna vagy fekete - föld (mínusz), piros - plusz az áramforrás, narancssárga vagy fehér - vezérlőjel. A vezérlőjelekről kicsit később beszélek.
Tehát a jel a táblára érkezik, amely ezt a jelet közvetlenül a motorhoz küldött impulzusokká alakítja át (2). Kicsit később visszatérünk rá.
Végül elérkeztünk ahhoz a részlethez, aminek köszönhetően le tudjuk olvasni és be tudjuk állítani a szervó forgásszögét (3). Az interneten találtam egy kiváló GIF-et, amely bemutatja a potenciométer elvét.
A potenciométer működési elve egyszerű. A potenciométernek 3 tűje van. A szélső kapcsokra plusz és mínusz tápot adnak (a polaritás nem számít), a kivezetések között egy ellenállás anyag van, amely mentén a középső kapocsra kapcsolt csúszka mozog. Esetünkben megegyezünk abban, hogy a szélsőbalon plusz, a jobb szélen mínusz. A gomb bal szélső állásból jobb szélső helyzetbe forgatásával növeljük az ellenállást, és ezzel egyidejűleg a bemenet feszültségét a feltételesen minimumra csökkentjük, amit a középső kimenetről eltávolítunk. A minimális feszültség értéke egy adott potenciométer maximális ellenállásának értékétől függ. Az általunk vizsgált szervókban leggyakrabban 5 kiloohmos potenciométereket szerelnek fel.
Kitaláltuk a készüléket, most térjünk vissza a szervóhoz. A szervo meghajtó gombja a szervo kimenő tengelyhez van rögzítve, ezért a kimenő tengely elforgatásakor megváltoztatjuk az értéket a potenciométeren. Feltételesen elfogadjuk az öt voltnak megfelelő bemeneti feszültséget (potenciométer gomb a szélső jobb pozícióban), hagyjuk, hogy a potenciométer a bal szélső állásban kapcsoljon ki minden feszültséget, és a minimális feszültség nulla lesz, a felezőponton pedig két és fél volt. Ezekből a feltételekből azt kapjuk, hogy 180 °-os szögben a potenciométer kimeneténél 5 volt, 90 ° -nál 2,5 volt és 0 ° 0 volt. Miért beszélek erről ilyen részletesen? Ismét visszatérünk a vezérlőpultra.
A szervomotor 0°-os helyzetben van. Vezérlőjelet adunk a vezérlőkártya bemenetére, amely információt hordoz a szervo 90 ° -os elfordulásáról. A tábla elektronikus töltése leolvassa a potenciométer állását, 0 voltot lát a potenciométeren, és a programban eltömődött, hogy 2,5-nek kell lennie. Ez az egész lényeg. A tábla elemzi a különbséget, majd kiválasztja a motor forgásirányát, és addig forgatja, amíg a potenciométer kimenetén a feszültség két és fél V lesz.
Menjünk tovább. Hogy ne forduljak még egyszer felfelé, képet keresve adom újra.
A mikromotor (4) nem képes nagy erőt (nyomatékot) kifejteni a tengelyen, de nagy a forgási sebessége. Ahhoz, hogy egy nagy szögsebességet kis nyomatékkal kis nyomatékúvá alakítsunk át, pontosan erre van szükségünk, használjunk sebességváltót. A sebességváltót a motor tengelyét és a kimenő tengelyt (5) összekötő fogaskerekek képviselik. A kevesebb fogú fogaskerék meghajt egy több fogaskereket. ettől a fordulatszám csökken, de a nyomaték nő.A váltó működési elvét jobban megértheti, ha felvesz egy szervo hajtást és megpróbálja elforgatni a szervo kart. Nehéz? Természetesen, mert a hátsó oldalon a sebességváltó szorzóvá alakul, egy mechanikus eszközzé, amely éppen ellenkezőleg, az alacsony fordulatszámú erőteljes pillanatot nagy sebességű gyengévé alakítja.
A szervók főbb jellemzői:
. Tengelyerő
A tengelyre ható erő, más néven nyomaték, a szervohajtás egyik legfontosabb mutatója, és kg / cm-ben mérik. A specifikációk általában két tápfeszültség opcióra vonatkoznak, leggyakrabban 4,8 V és 6,0 V.
A 15 kg/cm-es nyomaték azt jelenti, hogy a szervó képes egy hintaszéket álló helyzetben tartani vízszintes helyzetben 1 cm-es váll és 15 kg-os teher felfüggesztve rá, vagy 1 kg-os terhelést hintán tartani. szék 15 cm vállszélességgel.
A lengőkar hossza fordítottan arányos a tartott teher tömegével. Ennél a meghajtásnál 2 cm-es hossznál 7,5 kg-ot, a kar hosszát 0,5 cm-re csökkentve pedig akár 30 kg-ot is kapunk.
. fordulási sebesség
A fordulási sebesség is az egyik legfontosabb jellemző. Ezt a szervo kimenő tengely helyzetének 60 ° -kal történő megváltoztatásához szükséges időegyenértékben szokás jelezni. Ezt a karakterisztikát leggyakrabban 4,8 V és 6,0 V esetén is jelzik.
Például a 0,13 s/60°-os karakterisztika azt jelenti, hogy ennek a szervónak a 60°-os elfordítása legalább 0,13 másodperc alatt teljesíthető.
. Szervo típus
Digitális vagy analóg
. Tápfeszültség
A legtöbb hobbi szervó feszültsége 4,8 V és 7,2 V között van
. Forgási szög
Ez a maximális szög, amellyel a kimenő tengely elfordulhat. A szervohajtások forgási szögei főként 180°-os és 360°-osak.
. A szervó állandó forgása
Szervohajtásokat és állandó forgást állítanak elő. Ha nem lehet ilyet vásárolni, de nagyon szükséges, akkor át lehet készíteni egy normál szervót.
. Szűkítő típus
A szervo hajtóművek fémből, szénszálasból, műanyagból készülnek, vagy fém és műanyag fogaskerekekből készülnek.

A műanyag fogaskerekek rosszul viselik a terhelést és az ütéseket, de nagyon kevés a kopásuk. A szénszál erősebb, mint a műanyag, de sokkal drágább. A fém fogaskerekek ellenállnak a nagy terheléseknek, ütéseknek, eséseknek, de ez a fajta fogaskerekes kopás a legnagyobb.
Azt is szeretném megjegyezni, hogy a kimenő tengely különböző szervókon eltérően van felszerelve. A legtöbben hüvelyen csúszik a tengely, erősebb szervókon már golyóscsapágyat használnak.

Szervo meghajtók méretei:
A szervohajtások 4 fő méretre oszthatók. Az alábbiakban felsoroljuk a szervók típusait súlyukkal és méretükkel. A különböző szervók méretei kissé eltérhetnek az alább láthatótól.
Mikro: 24mm x 12mm x 24mm, súly: 8-10g.
Mini: 30mm x 15mm x 35mm, súlya 23-25g.
Standard: 40mm x 20mm x 37mm, Súly: 50-80g.
Óriás: 49x25x40mm, súlya 50-90g.
Cikksorozat a szervókról:
Vásároljon Oroszországban
Ebben a leckében megvizsgáljuk a szervók eszközét és működési elvét. Elemezzünk két egyszerű vázlatot egy szervó vezérléséhez az Arduino potenciométerével. Új parancsokat is megtanulunk a C++ programozási nyelvben − szervo.írja, szervo.olvasni, szervo.csatoljaés megtanulják, hogyan lehet vázlatokban könyvtárat csatlakoztatni szervók és egyéb eszközök vezérléséhez az Arduinón keresztül.
Szervomotoros eszköz (szervo)
A szervohajtás (szervomotor) fontos eleme a különféle robotok és mechanizmusok tervezésének. Ez egy pontos előadó, amelynek visszacsatolása lehetővé teszi a mechanizmusok mozgásának pontos vezérlését. Más szavakkal, a szervomotor a vezérlőjel értékét a bemeneten fogadva igyekszik fenntartani ezt az értéket a működtetője kimenetén.
A szervohajtásokat széles körben használják a robotok mechanikus mozgásának szimulálására. A szervohajtás egy érzékelőből (fordulatszám, pozíció stb.), egy mechanikus rendszerből származó hajtásvezérlő egységből és egy elektronikus áramkörből áll. A készülék reduktorai (fogaskerekei) fémből, szénszálból vagy műanyagból készülnek. A szervomotor műanyag fogaskerekei nem bírják a nagy terheléseket és ütéseket.
A szervomotor beépített potenciométerrel rendelkezik, amely a kimenő tengelyhez csatlakozik. A tengely elforgatásával a szervo megváltoztatja a feszültség értékét a potenciométeren. A tábla elemzi a bemeneti jel feszültségét és összehasonlítja a potenciométer feszültségével, a különbség alapján a motor addig fog forogni, amíg a kimenet és a potenciométer feszültségét ki nem egyenlíti.
 Szervovezérlés impulzusszélesség-modulációval
Szervovezérlés impulzusszélesség-modulációval Hogyan lehet szervót csatlakoztatni az Arduinohoz
Az Arduino szervó bekötési rajza általában a következő: fekete vezeték a GND-hez, piros vezeték az 5 V-hoz, narancssárga/sárga vezeték az analóg PWM (impulzusszélesség-moduláció) érintkezőhöz. Az Arduino szervovezérlése meglehetősen egyszerű, de a szervomotorok 180 ° és 360 ° -kal elforgathatók elfordulási szögekben, amit a robotikánál figyelembe kell venni.
A leckéhez a következő részletekre van szükségünk:
- Arduino Uno / Arduino Nano / Arduino Mega tábla;
- Kenyér deszka;
- USB kábel;
- 1 szervó;
- 1 potenciométer;
- Drótok "apa-apa" és "apa-anya".

Az első vázlatban megnézzük, hogyan vezérelhetünk szervót Arduino-n a myservo.write(0) paranccsal. Használjuk a Servo.h szabványos könyvtárat is. Csatlakoztassa a szervót az Arduino kártyához a fenti képen látható diagramnak megfelelően, és töltse fel a kész vázlatot. A void loop() eljárásban egyszerűen beállítjuk a szervó kívánt forgási szögét és azt, hogy mennyi ideig kell várni a következő forgatásig.
Arduino szervo vázlat
#beleértveMagyarázatok a kódhoz:
- A Servo.h szabványos könyvtár további parancsokat tartalmaz, amelyek nagyban leegyszerűsíthetik a vázlatot;
- A Servo változóra azért van szükség, hogy ne tévedjünk össze, amikor több szervót csatlakoztatunk az Arduinohoz. Minden meghajtónak saját nevet adunk;
- A servo1.attach(10) parancs a meghajtót a 10. analóg kimenethez köti.
- A programban a meghajtót 0-90-180 fokkal elforgatjuk, és visszatérünk a kiindulási helyzetbe, mivel az üres hurok eljárás ciklikusan ismétlődik.
Szervovezérlés potenciométerrel
 Szervo és potenciométer csatlakoztatása Arduino Uno-hoz
Szervo és potenciométer csatlakoztatása Arduino Uno-hoz Az Arduino nem csak a vezérlést teszi lehetővé, hanem a szervó jelzéseinek olvasását is. A myservo.read(0) parancs beolvassa az aktuális szervotengely szögét, és ezt láthatjuk a port monitoron. Mutassunk egy bonyolultabb példát a szervó potenciométerrel történő vezérlésére Arduino-n. Szerelje össze a potenciométer áramkört, és töltse fel a szervovezérlő vázlatot.
Vázlat egy potenciométerrel ellátott szervóhoz
#beleértveMagyarázatok a kódhoz:
- Ezúttal a vázlatban szereplő szervót szervónak neveztük el;
- A servo.write(analogRead(A0)/4) parancs átadja a szervo tengely értékeit - a potenciométerről kapott feszültséget elosztjuk néggyel, és ezt az értéket elküldjük a szervónak.
- A Serial.println (servo.read(10)) parancs beolvassa a szervotengely szögértékét, és elküldi a portfigyelőnek.
A szervomotorokat gyakran használják különféle Arduino projektekben különféle funkciókhoz: esztergáló szerkezetek, mechanizmusok mozgó részei. Mivel a szervomotor folyamatosan törekszik egy adott forgásszög megtartására, készüljön fel a megnövekedett energiafogyasztásra. Ez különösen érzékeny az akkumulátorral vagy akkumulátorral működő autonóm robotoknál.
Gyakran olvassa el ezt is:

A modern csúcstechnológiás berendezések olyan szerkezeti elemek használatát jelentik, amelyek lehetővé teszik az állandó dinamikus mozgásokat a tengely forgási szögének állandó szabályozásával, valamint lehetővé teszik az elektromechanikus eszközök sebességének szabályozását. Az ilyen feladatok teljes komplexuma szervomotorok segítségével megoldható. Ezek egy elektromos hajtásrendszer, amely lehetővé teszi a sebesség hatékony szabályozását a kívánt tartományban. Az ilyen eszközök használata lehetővé teszi a folyamatok nagy gyakoriságú periodikus ismétlődését. A szervomotorok az elektromos hajtás innovatív változatai, ezért széles körben használják a gépiparban és más iparágakban. Az ilyen eszközök kombinálják a nagy hatékonyságot és az alacsony zajszintet.
Szervomotoros készülék
A szervomotor kialakításához a következő elemekre van szükség:
- forgórész;
- állórész;
- Kapcsolásra szánt alkatrészek (dugók vagy kapocsdobozok);
- Visszacsatolás érzékelő (kódoló);
- Menedzsment, ellenőrzés és korrekció csomópontja;
- Be- és kikapcsolási rendszer;
- Házak (tokos motoroknál)
A fő konstruktív különbség a szóban forgó eszközök és a hagyományos egyen- és váltakozóáramú, kefével felszerelt vagy anélküli motorok között az a képesség, hogy ezeket a rotor fordulatszámának, nyomatékának és helyzetének változtatásával lehet vezérelni.
A rendszer segítségével a motor be- és kikapcsolható mechanikai(ellenállások, potenciométerek stb.) ill elektronikus(mikroprocesszoros) típusú. Ez azon az elven alapul, hogy a visszacsatoló érzékelő adatait és a beállított értéket összehasonlítják a relén keresztül a készülékre táplált feszültséggel. A csúcstechnológiás sémák figyelembe veszik a forgórész tehetetlenségét is, amely biztosítja annak egyenletes gyorsulását és lassítását.
Elméletileg minden szervomotor besorolható a precíziós pozicionáló rendszerek, gépek és eszközök nagy teljesítményű működtetőrendszerei közé. A szervomotor fő feladata, hogy az aktuátort pontosan a tér kívánt pontjára helyezze.
Működés elve

A szervomotorok működésének fő szempontja a rendszeren belüli működés feltételei G kódok, vagyis egy speciális programban található vezérlőparancsok. Ezt a kérdést egy példával vizsgálva CNC, akkor a szervomotorok olyan átalakítókkal együtt működnek, amelyek a bemeneti feszültségszint alapján változtatják a feszültségértéket az armatúránál vagy a motor gerjesztő tekercsén. Általában az egész rendszert a CNC rack vezérli. Az X koordináta tengelye mentén meghatározott távolság megtételére vonatkozó parancs fogadásakor a rack a rack digitális-analóg átalakító alegységében bizonyos mennyiségű feszültséget generál, amely a megadott koordináta meghajtójának táplálására kerül. A szervomotorban megindul a vezérorsó forgása, amellyel a jeladó és a gép végrehajtó teste kapcsolódik. Az elsőben impulzusokat generálnak, amelyeket a rack számlál. A program biztosítja, hogy a kódolótól érkező jelek száma megfeleljen a végrehajtó mechanizmus egy bizonyos áthaladási távolságának. Amikor a szükséges számú impulzus érkezik, az analóg konverter nulla kimeneti feszültséget ad ki, és a szervomotor leáll. A gép munkaelemeinek külső hatására bekövetkező elmozdulás esetén az enkóderen impulzus keletkezik, amelyet a rack számít ki, a hajtásra nem illesztési feszültség kerül, és a motor armatúrája addig forog, amíg nulla eltérési érték nem lesz. kapott. Az eredmény a gép munkaelemének pontos megtartása egy adott helyzetben.
Szervomotorok fajtái
Más készülékekhez hasonlóan a szervomotorok is többféle változatban kaphatók. Az ilyen típusú termékek a következők:
- Gyűjtő;
- Gyűjtő nélküli.
A készülékek egyen- és váltakozó árammal is táplálhatók. Az AC szervomotorok viszonylag olcsók. A termékek aszinkron és szinkron változatban is elérhetőek a piacon. A szinkron változatban a termék működése során a mágneses tér mozgása egybeesik a forgórész forgásával, így az állórészhez viszonyított irányuk megegyezik. Az aszinkron eszközök vezérlése a tápáram paramétereinek megváltoztatásával történik (frekvencia változtatása inverterrel). Az egyenárammal hajtott szervomotoroknál a DC rövidítés szerepel. Az ilyen típusú termékeket leggyakrabban folyamatos működésre tervezett berendezésekben használják, mivel működés közben nagyobb stabilitást mutatnak.
A szervomotorok műszaki adatai
A szinkron és aszinkron motorok teljesítményjellemzői némileg eltérőek.
| Szinkron szervomotorok | Aszinkron szervomotorok |
| Nagy munkadinamikával rendelkeznek (a statikus állapotból a dinamikus állapotba való átmenet sebessége). | Közepes és magas munkadinamikával rendelkeznek. |
| A nagy tehetetlenségi terhelések időszakában ezek közepesen jól szabályozottak. | A tehetetlenségi típusú terhelések csúcspontjain jól be vannak hangolva. |
| Képes ellenállni a nagy túlterheléseknek (legfeljebb 6 Mn, az egység típusától függően). | A túlterhelés képessége megközelíti a háromszoros értéket. |
| A megengedett hőterhelések magas határértékkel rendelkeznek, ha hosszú ideig működnek a tengely fordulatszámának teljes tartományában. | A motorok képesek ellenállni a nagy hőterhelésnek, amelynek szintje a tengely forgási sebességétől függ. |
| A termék hűtése konvekciós technológiával, valamint speciálisan biztosított hűtőbordákkal vagy hősugárzással történik. | A mechanizmus alkatrészeinek hűtése a tengelyre helyezett járókerékkel, vagy erővel történik. |
| Kiváló minőségű tengely fordulatszám szabályozás. | A tengely fordulatszáma magas minőségi szinten szabályozott. |
| Hosszú távú működés alacsony fordulatszámon induló nyomatékkal lehetséges. | A nagy hőterhelés miatt a hosszú távú működés alacsony fordulatszámon nem lehetséges kényszerhűtés nélkül. |
| Az átalakító (a jellemzőktől függően) lehetővé teszi a fordulatszám szabályozását 1-től 5000-ig vagy még ennél is nagyobb tartományban. | A forgási frekvenciát egy konverter vezérli, amelynek nagy hatásfoka 1 és 5000 és több között van. |
| Alacsony fordulatszámon nyomatékhullámok figyelhetők meg. | Működés közben gyakorlatilag nincs nyomaték hullámzás. |
Szervomotorok alkalmazási területei
Magas dinamikájuknak, kiváló pozicionálási pontosságuknak és a szervomotorok túlterhelési ellenállásának köszönhetően különféle tevékenységi területeken alkalmazzák. A legtöbb ilyen terméket az acéliparban, csévélők, extruderek, műanyag fröccsöntő gépek, nyomda- és csomagolóberendezések gyártásában, az élelmiszeriparban és az italgyártásban használják fel. Ezenkívül az eszközök szerves részét képezik a CNC gépeknek, prés- és bélyegző berendezéseknek, autógyártó soroknak stb. fő irány A szervomotorok alkalmazásai az előtoló hajtások és a pozicionáló gépek digitális vezérlőrendszerek.
Szervók csatlakoztatása

Szervomotor csatlakoztatásakor mindenekelőtt ellenőrizze, hogy a tápkábelek megfelelően vannak-e csatlakoztatva. A szervomotorok két vezetékkészlettel rendelkeznek. Tápellátás (teljesítmény) és vezetékek a kódolóból. 3 tápvezeték van a kötegben, ezek a meghajtóhoz vannak kötve. A kódoló vezetékei az illesztőprogram COM portjához csatlakoznak. Az élelmiszer típusa és értéke a termék típusától függ.
A kis szervók általában 3 vezetékesek. 1 vezeték közös, 1 pozitív és 3 jelvezeték a sebességérzékelőtől. Az ilyen tápellátási séma gyakori az alacsony fordulatszámú, kis teljesítményű szervóknál, amelyek sebességváltóval rendelkeznek.
A vezérlőjelek továbbításához árnyékolt, csavart vezetékek használata javasolt. Az elektromágneses terek interferencia lehetőségének kizárása érdekében nem szükséges a tápkábelt és a vezérlővezetékeket egymás mellé helyezni. Legalább harminc centiméter távolságra kell őket elhelyezni.
A szervomotorok előnyei és hátrányai
A szervomotorok csendesek és egyenletesen működnek. Megbízható és problémamentes termékekről van szó, amelyeknek köszönhetően széles körben használják kritikus aktuátorok létrehozásában. Alacsony sebességnél is nagy sebesség és mozgási pontosság érhető el. Ilyen motort a felhasználó választhat ki a soron következő megoldandó feladatoktól függően. A hátrányok közé tartozik a modul magas költsége, valamint konfigurációjának bonyolultsága. A szervomotorok gyártásához csúcstechnológiás ipari berendezésekre van szükség.
Ily módon a felhasználók olyan szervomotorokat vásárolhatnak, amelyek a legmegfelelőbbek a jövőbeni működésük körülményei között, így rendkívül megbízható és működőképes hajtóművet hozhatnak létre.
Sokan felteszik a kérdést: szervo - mi ez? A klasszikus szervó kialakítás egy motort, egy helyzetérzékelőt és egy háromhurkos vezérlőrendszert (helyzet-, sebesség- és áramszabályozás) tartalmaz.
A „servo” szó latin eredetű „servus”, szó szerinti fordítása „rabszolga”, „segéd”, „szolga”.
A gépiparban segédalkatrészként működtek az eszközök (előtolás meghajtás szerszámgépben, robotban stb.). Mára azonban a helyzet megváltozott, és a szervo fő célja a szervo mechanizmusok területén való megvalósításban rejlik.
A szervohajtás felszerelése abban az esetben indokolt, ha a hagyományosak nem szabályozzák kellőképpen a munka pontosságát.

A magas teljesítményű berendezésekben jó minőségű műszerek használata szükséges.
Ez a cikk a szervóról, mi az és hogyan működik.
A készülék felhasználási területei
A modern világban, amikor az automatizálás a gépészet minden területén erős pozíciót foglal el, az összes mechanizmus kialakítása észrevehetően egységesült. Ebben az esetben modern egyedi meghajtókat használnak.
Ahhoz, hogy megértsük, mi az a szervo, ismernie kell az eszköz hatókörét.
A készülékek precíziós szerkezeteket tartalmaznak a sebesség fenntartására és a szerszámgépek nagy pontosságára. Fúróberendezésekre, különféle szállítórendszerekbe és segédmechanizmusokba vannak felszerelve.
Az eszközöket legszélesebb körben a következő területeken használják:
- papír és csomagolás gyártása;
- fémlemezek gyártása;
- anyagmozgatás;
- szállítóeszközök gyártása;
- építőanyag gyártás.
Szervó az autó csomagtartójához
Az autó csomagtartó szervóinak számos modellje létezik különböző gyártóktól. Tekintsük egy ilyen eszköz funkcionalitását a hazai Avtozebra gyártó törzs szervójaként. A készüléket orosz autókhoz tervezték, de nem csak. Például egy Renault Logan autóban használható.

A felhasználói vélemények szerint ez a kialakítás kényelmes. Lehetővé teszi a csomagtartó kinyitását és zárását anélkül, hogy elhagyná az autót.
A készülék vezérlése az utastérben vagy az utastérben elhelyezett gombbal történik
Az eszköz széles körű használatának oka
A szervohajtások gyakori használatának oka a következő volt:
- az irányítás megszerzésének lehetősége, amelyet nagy pontosság és stabil működés jellemez;
- sebességszabályozás széles skálája;
- magas szintű interferenciaállóság;
- a készülék kis mérete és súlya.
A szervo működési elve
Hogyan működik a készülék? A szervo egy vagy több rendszerjel visszacsatolása alapján szabályoz egy objektumot. A készülék kimenetjelzője belép a bemenetre, ahol összehasonlításra kerül a beállítási művelettel.
A mozgás jellemzői
A szervo meghajtó eszköznek két fő jellemzője van:
- a teljesítmény növelésének képessége;
- visszajelzési információk nyújtása.

Az erősítésre azért van szükség, hogy a kimeneten nagyon magas energiaigény (külső forrásból származik), a bemeneten pedig elenyésző a mutatója.
A visszacsatolás nem más, mint egy zárt áramkör, amelyben a jelek nem illeszkednek a bemeneten és a kimeneten. Ezt a folyamatot a menedzsmenthez használják.
Ebből következik a következtetés: az előre irányú áramkör energiaadóként, a fordított irányban pedig a szabályozás pontosságához szükséges információ közvetítőjeként szolgál.
Tápellátás és a készülék csatlakozóinak kivezetése
Az RC konfigurációkhoz használható szervó általában három vezetékkel rendelkezik:
- Jelzés. Egy vezérlő impulzus kerül továbbításra rajta. A vezeték általában fehér, sárga vagy piros színű.
- Táplálás. Tápfeszültségjelzője 4,8 és 6 V között van. Gyakran ez egy piros vezeték.
- Földelés. A vezeték fekete vagy barna.

A működtető méretei
Az aggregátumok három kategóriába sorolhatók:
- mikromeghajtók;
- szabványos módosítások;
- nagyméretű készülékek.
Vannak más méretű szervók is, de a fenti típusok teszik ki az összes készülék 95%-át.
A termék főbb jellemzői
A szervó működését két fő mutató jellemzi: a forgási sebesség és a tengelyre ható erő. Az első érték az idő mutatójaként szolgál, amelyet másodpercekben mérnek. Az erőt kg / cm-ben mérik, vagyis azt, hogy a mechanizmus milyen szintű erőt fejt ki a forgásközéppontból.

Általában ez a paraméter az eszköz fő céljától függ, és csak ezután a sebességváltó fogaskerekek számától és az eszközben használt csomópontoktól.
Amint már említettük, jelenleg olyan mechanizmusokat gyártanak, amelyek 4,8–6 V tápfeszültséggel működnek. Gyakrabban ez a szám 6 V. Azonban nem minden modellt széles feszültségtartományra terveztek. Néha a szervomotor csak 4,8 V-on vagy csak 6 V-on működik (ez utóbbi konfigurációk rendkívül ritkák).

Analóg és digitális módosítások
Néhány évvel ezelőtt minden szervo áramkör analóg volt. Ma már digitális tervek is vannak. Mi a különbség a munkájuk között? Térjünk rá a hivatalos információkra.
A Futaba jelentése szerint az elmúlt évtizedben a szervohajtások műszakilag a korábbiaknál jobbak lettek, valamint a kis méretű, nagy forgási sebességű és torziós elemek is.
A fejlesztés legújabb köre a digitális eszköz megjelenése. Ezeknek az egységeknek még a kollektor típusú motorokkal szemben is jelentős előnyei vannak. Bár vannak árnyoldalai is.
Külsőleg az analóg és a digitális eszközök megkülönböztethetetlenek. Az eltérések csak az eszköztáblákon vannak rögzítve. A digitális egység mikroáramköre helyett egy mikroprocesszor látható, amely elemzi a vevő jelét. Ő irányítja a motort.
Teljesen helytelen azt állítani, hogy az analóg és a digitális módosítások működése alapvetően különbözik. Lehet, hogy ugyanazok a motorok, mechanizmusok és potenciométerek.
A fő különbség a vevő és a motorvezérlés bejövő jelének feldolgozásának módja. Mindkét szervó ugyanazt a teljesítményjelet kapja a rádióvevőtől.
Így világossá válik, szervo, mi az?
Az analóg módosítás működési elve
Az analóg módosításnál a vett jelet összehasonlítják a szervomotor aktuális helyzetével, majd az erősítő jelét elküldik a motornak, aminek hatására a motor a megadott pozícióba mozog.A folyamatfrekvencia jelző másodpercenként 50-szer. Ez a minimális válaszidő. Ha elutasítja az adó fogantyúját, akkor rövid impulzusok kezdenek áramolni a szervo felé, amelyek közötti intervallum 20 m / s. Az impulzusok között semmi sem kerül a motorba, és a külső hatások bármilyen irányba megváltoztathatják a készülék működését. Ezt az időintervallumot "holt zónának" nevezik.
Hogyan működik a digitális tervezés
A digitális eszközök speciális processzort használnak, amely magas frekvencián működik. Feldolgozza a vevő jelét, és másodpercenként 300-szor vezérlő impulzusokat küld a motornak. Mivel a frekvenciajelző sokkal magasabb, a reakció észrevehetően gyorsabb és jobban tartja a pozíciót. Ez optimális központosítást és magas szintű csavarodást eredményez. Ez a módszer azonban sok energiát igényel, így az analóg mozgatáshoz használt akkumulátor sokkal gyorsabban lemerül ebben a kialakításban.
Mindazonáltal minden felhasználó, aki valaha is találkozott digitális modellel, azt mondja, hogy az analógtól való eltérése olyan jelentős, hogy soha többé nem használná az utóbbit.
Következtetés
A digitális analógokat választja, ha szüksége van:
- magas szint ;
- a „holt zónák” minimális száma;
- pontos pozicionálási szint;
- gyors reagálás a parancsra;
- állandó erő a tengelyen forgáskor;
- magas teljesítményszint.
Most már tudja, mi az a szervo és hogyan kell használni.