Mikä on servokäyttö, servoohjaus. Laitteen kuvaus ja servokäytön toimintaperiaate Servomoottorin ohjaus
Tässä artikkelissa käsitellään servoja: niiden laitetta, tarkoitusta, servoohjausta, servoliitäntää, servotyyppejä ja niiden vertailua. Aloitetaan ja aloitetaan siitä, mikä servo on.
Servon käsite
Servokäyttö ymmärretään useimmiten sähkömoottorilla varustettuna mekanismina, jota voidaan pyytää kääntymään tiettyyn kulmaan ja pitämään tätä asentoa. Tämä ei kuitenkaan ole täydellinen määritelmä.
Tarkemmin sanottuna servokäyttö on taajuusmuuttaja, joka ohjaa negatiivisen palautteen kautta, jonka avulla voit ohjata liikeparametreja tarkasti. Servokäyttö on minkä tahansa tyyppinen mekaaninen käyttö, joka sisältää anturin (asento, nopeus, voima jne.) ja käyttöohjausyksikön, joka ylläpitää automaattisesti tarvittavat parametrit anturissa ja laitteessa tietyn ulkoisen arvon mukaisesti.
Toisin sanoen:
Servokäyttö vastaanottaa ohjausparametrin arvon tulona. Esimerkiksi kiertokulma
Ohjausyksikkö vertaa tätä arvoa anturin arvoon
Taajuusmuuttaja suorittaa vertailun tuloksen perusteella jotain toimintoa, kuten kääntymistä, kiihdyttämistä tai hidastamista, jotta sisäisen anturin arvo tulee mahdollisimman lähelle ulkoisen ohjausmuuttujan arvoa.
Yleisimmät ovat servot, jotka pitävät tietyn kulman ja servot, jotka ylläpitävät tietyn pyörimisnopeuden.
Tyypillinen harrastusservo on esitetty alla.
Miten servot on järjestetty?
Servo laite
Servokäytöissä on useita komponentteja.

Veto - sähkömoottori vaihteistolla. Sähkön muuntamiseksi mekaaniseksi pyörimiseksi tarvitset sähkömoottori. Usein moottorin pyörimisnopeus on kuitenkin liian suuri käytännön käyttöön. Käytetään nopeuden hidastamiseen vähennin: vaihteistomekanismi, joka siirtää ja muuntaa vääntömomenttia.
Kytkemällä sähkömoottorin päälle ja pois, voimme pyörittää ulostuloakselia - servon viimeistä vaihdetta, johon voimme kiinnittää jotain, jota haluamme ohjata. Kuitenkin, jotta laite voi ohjata asentoa, palaute anturi - enkooderi, joka muuttaa ohjauskulman takaisin sähköiseksi signaaliksi. Tähän käytetään usein potentiometriä. Kun potentiometrin liukusäädintä käännetään, sen vastus muuttuu suhteessa kiertokulmaan. Siten sitä voidaan käyttää mekanismin nykyisen sijainnin asettamiseen.
Sähkömoottorin, vaihteiston ja potentiometrin lisäksi servokäytössä on elektroninen täyttö, joka vastaa ulkoisen parametrin vastaanottamisesta, arvojen lukemisesta potentiometristä, vertailusta ja moottorin käynnistämisestä / sammuttamisesta. Hän on vastuussa negatiivisen palautteen ylläpitämisestä.
Servoon menee kolme johtoa. Kaksi niistä vastaa moottorin tehosta, kolmas antaa ohjaussignaalin, jota käytetään laitteen asennon asettamiseen.
Katsotaanpa nyt, kuinka servoa ohjataan ulkoisesti.
Servo ohjaus. Ohjaussignaalin liitäntä
Halutun asennon osoittamiseksi servolle on lähetettävä ohjaussignaali tähän tarkoitettua johtoa pitkin. Ohjaussignaali - vakiotaajuiset ja vaihtelevan leveyden pulssit.

Servon asento riippuu pulssien pituudesta. Kun signaali tulee ohjauspiiriin, siinä oleva pulssigeneraattori tuottaa oman pulssin, jonka kesto määritetään potentiometrin avulla. Toinen piirin osa vertaa kahden pulssin kestoa. Jos kesto on erilainen, sähkömoottori käynnistetään. Pyörimissuunta määräytyy sen mukaan, kumpi pulsseista on lyhyempi. Jos pulssien pituudet ovat yhtä suuret, sähkömoottori pysähtyy.
Useimmiten harrastusservoissa pulsseja tuotetaan 50 Hz:n taajuudella. Tämä tarkoittaa, että pulssi lähetetään ja vastaanotetaan kerran 20 ms:ssa. Tyypillisesti pulssin kesto 1520 µs tarkoittaa, että servon tulee ottaa keskiasento. Pulssin pituuden lisääminen tai vähentäminen saa servon kääntymään myötä- tai vastapäivään. Tässä tapauksessa pulssin kestolla on ylä- ja alarajat. Arduinon servokirjastossa pulssin oletuspituudet ovat 544 µs 0°:lle ja 2400 µs 180°:lle.
Huomaa, että tietyssä laitteessasi tehdasasetukset voivat poiketa tavallisista. Jotkut servot käyttävät pulssin leveyttä 760 µs. Tässä tapauksessa keskiasento vastaa 760 µs, samalla tavalla kuin perinteisissä servokäytöissä keskiasento vastaa 1520 µs.
On myös syytä huomata, että nämä ovat vain yleisesti hyväksyttyjä pituuksia. Jopa samassa servomallissa saattaa esiintyä valmistusvirhe, jonka vuoksi pulssipituuksien toiminta-alue on hieman erilainen. Tarkkaa toimintaa varten jokainen tietty servo on kalibroitava: kokeiden avulla on tarpeen valita oikea sille ominainen alue.
Muuta huomionarvoista on terminologian sekavuus. Usein tapaa ohjata servoja kutsutaan PWM / PWM (Pulse Width Modulation) tai PPM (Pulse Position Modulation). Näin ei ole, ja näiden menetelmien käyttö voi jopa vahingoittaa asemaa. Oikea termi on PDM (Pulse Duration Modulation). Siinä pulssien pituus on erittäin tärkeä ja niiden esiintymistiheys ei ole niin tärkeä. 50 Hz on normi, mutta servo toimii oikein sekä 40 että 60 Hz:llä. Ainoa asia, joka on pidettävä mielessä, on se, että taajuuden voimakkaalla laskulla se voi toimia nykimisenä ja pienemmällä teholla, ja taajuuden voimakkaalla kasvulla (esimerkiksi 100 Hz) se voi ylikuumentua ja epäonnistua.
Servon tekniset tiedot
Nyt selvitetään, mitä servot ovat ja mitä ominaisuuksia niillä on.
Vääntömomentti ja kääntönopeus
Puhutaan ensin kahdesta erittäin tärkeästä servon ominaisuudesta: vääntömomentti ja noin kääntymisnopeus.
Voiman momentti tai vääntömomentti on fyysinen vektorisuure, joka on yhtä suuri kuin sen sädevektorin tulo, joka on vedetty pyörimisakselilta tämän voiman vektorin voiman kohdistamispisteeseen. Luonnehtii voiman pyörimisvaikutusta jäykkään kappaleeseen.

Yksinkertaisesti sanottuna tämä ominaisuus osoittaa, kuinka raskaan kuorman servo pystyy pitämään levossa tietyn pituisen vivun päällä. Jos servon vääntömomentti on 5 kg × cm, tämä tarkoittaa, että servo pitää vaakasuorassa asennossa painon päällä 1 cm pitkän vivun, jonka vapaaseen päähän on ripustettu 5 kg. Tai vastaavasti 5 cm pitkä vipu, josta ripustetaan 1 kg.
Servonopeus mitataan ajan kuluessa, joka kuluu servovarren pyörimiseen 60°. Ominaisuus 0,1 s/60° tarkoittaa, että servo kääntyy 60° 0,1 sekunnissa. Siitä on helppo laskea nopeus tutumpina arvoina, kierroksina minuutissa, mutta niin tapahtui, että servoja kuvattaessa tällaista yksikköä käytetään useimmiten.
On syytä huomata, että joskus näiden kahden ominaisuuden välillä on tehtävä kompromissi, sillä jos haluamme luotettavan, raskaan servon, meidän on oltava valmiita siihen, että tämä mahtava laite kääntyy hitaasti. Ja jos haluamme erittäin nopean ajon, sen tasapainottaminen on suhteellisen helppoa. Samaa moottoria käytettäessä tasapaino määräytyy vaihteiston vaihteiden kokoonpanon mukaan.
Voimme tietysti aina ottaa enemmän tehoa kuluttavan laitoksen, kunhan sen ominaisuudet vastaavat tarpeitamme.
Muotoseikka
Servot vaihtelevat kooltaan. Ja vaikka virallista luokitusta ei ole, valmistajat ovat pitkään noudattaneet useita kokoja yleisesti hyväksytyllä kiinnitysjärjestelyllä. Ne voidaan jakaa:
pieni
standardi
Niillä on seuraavat tyypilliset mitat:
On myös niin sanottuja "erikoistyyppisiä" servoja, joiden mitat eivät kuulu tähän luokitukseen, mutta tällaisten servojen prosenttiosuus on hyvin pieni.
Sisäinen käyttöliittymä
Servokäytöt ovat joko analogisia tai digitaalisia. Joten mitkä ovat niiden erot, edut ja haitat?
Ulkoisesti ne eivät eroa toisistaan: sähkömoottorit, vaihteistot, potentiometrit ovat samat, ne eroavat vain sisäisestä ohjauselektroniikasta. Erikoisen analogisen servosirun sijaan digitaalinen vastine näkyy levyllä mikroprosessorilla, joka vastaanottaa pulsseja, analysoi niitä ja ohjaa moottoria. Fyysisessä versiossa ero on siis vain pulssien käsittelyssä ja moottorin ohjauksessa.

Molemmat servotyypit ottavat samat ohjauspulssit. Analoginen servo päättää sitten, muuttaako asentoa ja lähettää tarvittaessa signaalin moottorille. Tämä tapahtuu yleensä 50 Hz:n taajuudella. Siten saamme 20 ms - minimireaktioajan. Tällä hetkellä mikä tahansa ulkoinen vaikutus voi muuttaa servon asentoa. Mutta tämä ei ole ainoa ongelma. Lepotilassa sähkömoottoriin ei syötetä jännitettä; jos tasapaino poikkeaa hieman, sähkömoottoriin syötetään lyhyt signaali alhaisesta tehosta. Mitä suurempi poikkeama, sitä vahvempi signaali. Näin ollen pienillä poikkeamilla servo ei pysty pyörittämään moottoria nopeasti tai kehittämään suurta vääntömomenttia. "Kuolleet vyöhykkeet" muodostuvat ajassa ja etäisyydellä.
Nämä ongelmat voidaan ratkaista lisäämällä vastaanottotaajuutta, signaalinkäsittelyä ja moottorin ohjausta. Digitaaliset servot käyttävät erityistä prosessoria, joka vastaanottaa ohjauspulsseja, käsittelee niitä ja lähettää signaaleja moottorille taajuudella 200 Hz tai enemmän. Osoittautuu, että digitaalinen servo pystyy reagoimaan nopeammin ulkoisiin vaikutuksiin, kehittämään tarvittavan nopeuden ja vääntömomentin nopeammin, mikä tarkoittaa, että on parempi säilyttää tietty asento, mikä on hyvä. Tietenkin samalla se kuluttaa enemmän sähköä. Myös digitaaliset servot ovat vaikeampia valmistaa, ja siksi ne ovat huomattavasti kalliimpia. Itse asiassa nämä kaksi haittaa ovat kaikki digitaalisten servojen haitat. Teknisesti ne kukistavat analogiset servot.
Varusteiden materiaalit
Servovaihteet ovat useista eri materiaaleista valmistettuja: muovia, hiiltä, metallia. Kaikkia niitä käytetään laajalti, valinta riippuu tietystä tehtävästä ja siitä, mitä ominaisuuksia asennuksessa vaaditaan.

Muoviset, useimmiten nailoniset, vaihteet ovat erittäin kevyitä, eivät kuluu ja ovat yleisimpiä servokäytöissä. Ne eivät kestä raskaita kuormia, mutta jos kuormien odotetaan olevan pieniä, nailonvaihteet ovat paras valinta.
Hiilivaihteet ovat kestävämpiä, käytännössä eivät kulu ja ovat useita kertoja vahvempia kuin nailoniset. Suurin haittapuoli on korkea hinta.
Metallihammaspyörät ovat raskaimmat, mutta ne kestävät suurimmankin kuormituksen. Ne kuluvat melko nopeasti, joten vaihteet on vaihdettava melkein joka kausi. Titaanihammaspyörät ovat metallivaihteiden suosikkeja sekä teknisiltä ominaisuuksiltaan että hinnaltaan. Valitettavasti ne maksavat sinulle melko paljon.
Harjatut ja harjattomat moottorit
Servomoottoreita on kolmenlaisia: perinteinen ydinmoottori, ytimetön moottori ja harjaton moottori.

Perinteisessä ydinmoottorissa (oikealla) on tiheä rautaroottori, jonka ympärillä on lankakäämit ja magneetit. Roottorissa on useita osia, joten kun moottori pyörii, roottori saa moottorin värisemään hieman, kun osat ohittavat magneetit, mikä johtaa servoon, joka värisee ja on vähemmän tarkka kuin ytimetön moottoriservo. Onton roottorin moottorissa (vasemmalla) on yksi magneettisydän, jossa on sylinterin tai kellon muotoinen käämitys magneetin ympärillä. Sydämetön rakenne on kevyempi eikä siinä ole osioita, mikä johtaa nopeampaan vasteeseen ja tasaiseen, tärinättömään toimintaan. Nämä moottorit ovat kalliimpia, mutta ne tarjoavat korkeamman tason ohjauksen, vääntömomentin ja nopeuden kuin tavalliset moottorit.

Harjattomalla moottorilla varustetut servokäytöt ovat ilmestyneet suhteellisen hiljattain. Edut ovat samat kuin muissakin harjattomissa moottoreissa: harjoja ei ole, mikä tarkoittaa, että ne eivät aiheuta vastusta pyörimiselle eivätkä kulu, nopeus ja vääntömomentti ovat korkeammat virrankulutuksella, joka on yhtä suuri kuin kollektorimoottoreilla. Harjattomat moottoriservot ovat kalleimpia servoja, mutta ne tarjoavat paremman suorituskyvyn kuin servot muiden moottoreiden kanssa.
Yhteyden muodostaminen Arduinoon
Monet servot voidaan kytkeä suoraan Arduinoon. Tätä varten ne tulevat kolmen johdon kaapelista:
punainen - ruoka; liitetään 5V pintaan tai suoraan virtalähteeseen
ruskea tai musta - maa
keltainen tai valkoinen - signaali; liitetään Arduinon digitaalilähtöön.
Yhteyden muodostamiseksi Arduinoon on kätevää käyttää portin laajennuskorttia, kuten Troyka Shieldia. Vaikka muutamalla ylimääräisellä johdolla on mahdollista liittää servo leipälevyn kautta tai suoraan Arduinon nastoihin.
Ohjauspulsseja on mahdollista generoida itse, mutta tämä on niin yleinen tehtävä, että Servo-standardikirjasto on olemassa sen yksinkertaistamiseksi.
Ruokarajoitus
Tyypillinen harrastusservo kuluttaa yli 100 mA käytön aikana. Samaan aikaan Arduino pystyy toimittamaan jopa 500 mA. Siksi, jos sinun on käytettävä voimakasta servoa projektissa, on järkevää harkita sen eristämistä piiriin, jossa on lisätehoa.
Harkitse esimerkkiä 12 V:n servon kytkemisestä: 
Kytkettyjen servojen lukumäärän rajoitus
Useimmilla Arduino-levyillä Servo-kirjasto tukee enintään 12 servoa, Arduino Megalla tämä luku nousee 48:aan. Tämän kirjaston käytöllä on pieni sivuvaikutus: jos et työskentele Arduino Megan kanssa, on mahdotonta käytä analogWrite () -toimintoa 9 ja 10 nastassa riippumatta siitä, onko servot kytketty näihin nastoihin vai ei. Arduino Megaan voidaan kytkeä jopa 12 servoa rikkomatta PWM/PWM-toimintoa, jos käytämme enemmän servoja, emme voi käyttää analogWrite()-toimintoa nastoissa 11 ja 12.
Servokirjaston toiminnallisuus
Servokirjasto mahdollistaa servojen ohjelmistoohjauksen. Tätä varten luodaan Servo-tyyppinen muuttuja. Hallinta suoritetaan seuraavilla toiminnoilla:
attach() - Liittää muuttujan tiettyyn nastaan. Tälle funktiolle on kaksi mahdollista syntaksia: servo.attach(pin) ja servo.attach(pin, min, max) . Tässä tapauksessa pin on nastan numero, johon servo on kytketty, min ja max ovat pulssin pituudet mikrosekunteina, jotka vastaavat 0° ja 180° kiertokulmista. Oletusarvoisesti ne on asetettu arvoon 544 µs ja 2400 µs.
write() - käskee servoa hyväksymään jonkin parametrin arvon. Syntaksi on: servo.write(angle), jossa kulma on kulma, jonka servon tulee kääntyä.
writeMicroseconds() - antaa komennon lähettää tietyn pituinen pulssi servolle, on edellisen komennon matalan tason analogi. Syntaksi on: servo.writeMicroseconds(uS), jossa uS on pulssin pituus mikrosekunteina.
read() - lukee kulman nykyisen arvon, jossa servo on. Syntaksi on: servo.read() palauttaa kokonaisluvun 0 ja 180 välillä.
attach() - Tarkistaa, onko muuttuja liitetty tiettyyn nastaan. Syntaksi on: servo.attached() palauttaa boolen tosi, jos muuttuja on liitetty nastaan, tai false muussa tapauksessa.
detach() - suorittaa päinvastaisen toiminnon liitännälle() eli irrottaa muuttujan nastasta, jolle se on määritetty. Syntaksi on: servo.detach() .
Kaikki Servo2-kirjastomenetelmät ovat samoja kuin Servo-menetelmät.
Esimerkki Servo-kirjaston käytöstä
Päätelmän sijaan
Servokäytöt ovat erilaisia, jotkut ovat parempia - toiset ovat halvempia, jotkut ovat luotettavampia - toiset ovat tarkempia. Ja ennen kuin ostat servon, sinun tulee pitää mielessä, että sillä ei välttämättä ole parhaita ominaisuuksia, kunhan se sopii projektiisi. Onnea pyrkimyksiisi!
Tässä artikkelissa tarkastelemme servojen laitetta, toimintaperiaatetta, ominaisuuksia ja kokonaismittoja.
Servokäytön määritelmä
Servokäyttö (seuraava käyttö) on negatiivisen takaisinkytkennän kautta ohjattava taajuusmuuttaja, joka mahdollistaa liikeparametrien tarkan ohjauksen.
Servokäyttö on minkä tahansa tyyppinen mekaaninen käyttö (laite, työkappale), joka sisältää anturin (asento, nopeus, voima jne.) ja käyttöohjausyksikön (elektroninen piiri tai mekaaninen kytkentäjärjestelmä), joka ylläpitää automaattisesti tarvittavat parametrit anturi (ja vastaavasti laitteessa) asetetun ulkoisen arvon mukaan (säätönupin asento tai muiden järjestelmien numeerinen arvo).
Yksinkertaisesti sanottuna servokäyttö on "automaattinen tarkka suorittaja" - vastaanottaessaan ohjausparametrin arvon syötteenä (reaaliajassa), se "itse" (anturin lukemien perusteella) pyrkii luomaan ja ylläpitämään tätä arvoa toimilaitteen lähtö.

Käytetyt komponentit (ostettu Kiinasta):
Hyödyllinen asia servojen tarkistamiseen
Käsiteltyään määritelmää, siirrytään suoraan servon toimintaperiaatteen analyysiin
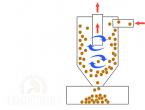
Selvyyden vuoksi annan heti kaavamaisen kuvan servon sisäosista.

Mennään analyysiin.
Yhdistääksesi ohjaimeen servosta vedetään 3 johtoa, jotka useimmiten puristetaan tavallisella 3-napaisella liittimellä, jonka jako on 2,54 mm (1). Johtojen värit voivat vaihdella. Ruskea tai musta - maadoitus (miinus), punainen - plus virtalähteestä, oranssi tai valkoinen - ohjaussignaali. Puhun ohjaussignaaleista hieman myöhemmin.
Joten signaali tulee kortille, joka muuntaa tämän signaalin pulsseiksi, jotka lähetetään suoraan moottoriin (2). Palaamme siihen hieman myöhemmin.
Lopulta olemme saavuttaneet yksityiskohdan, jonka ansiosta voimme lukea ja asettaa servon (3) kiertokulman. Internetistä löysin erinomaisen GIF:n, joka näyttää potentiometrin periaatteen.
Potentiometrin toimintaperiaate on yksinkertainen. Potentiometrissä on 3 nastaa. Plus- ja miinusteho syötetään ääriliittimiin (napaisuudella ei ole väliä), napojen välissä on resistiivinen aine, jota pitkin keskiliittimeen kytketty liukusäädin liikkuu. Meidän tapauksessamme olemme samaa mieltä siitä, että äärivasemmalla meillä on plus, äärioikealla miinus. Kiertämällä nuppia vasemmasta ääriasennosta äärimmäiseen oikeaan asentoon lisäämme vastusta ja samalla vähennämme tulon jännitteen ehdollisesti minimiin, jonka poistamme keskilähdöstä. Minimijännitteen arvo riippuu tietyn potentiometrin maksimivastuksen arvosta. Harkitsemiimme servoihin asennetaan useimmiten 5 kiloohmin potentiometrit.
Selvitimme laitteen, nyt palataan servoon. Servokäytön nuppi on kiinnitetty servon lähtöakseliin, joten kun lähtöakselia käännetään, muutamme potentiometrin arvoa. Hyväksymme ehdollisesti syöttöjännitteen (potentiometrin nuppi äärioikeassa asennossa) yhtä kuin viisi volttia, anna potentiometrin sammuttaa kaikki jännitteet äärivasemmassa asennossa ja minimijännite on nolla, ja keskipisteessä meillä on kaksi ja puoli volttia. Näistä ehdoista saamme, että 180 ° kulmassa potentiometrin lähdössä meillä on 5 volttia, 90 °:ssa 2,5 volttia ja 0 ° 0 voltissa. Miksi puhun tästä niin yksityiskohtaisesti? Palaamme jälleen ohjauspaneeliin.
Servomoottori on asennossa 0°. Ohjauskortin tuloon syötetään ohjaussignaali, joka välittää tietoa servon pyörimisestä 90 °. Levyn elektroninen täyttö lukee potentiometrin lukemat, näkee potentiometrissä 0 volttia ja ohjelmassa on tukossa, että sen pitäisi olla 2,5. Se on koko pointti. Levy analysoi eron, valitsee sitten moottorin pyörimissuunnan ja pyörittää sitä, kunnes jännite potentiometrin lähdössä on kaksi ja puoli volttia.
Mennään pidemmälle. Jotta sivua ei käännetä uudelleen ylös, annan sen uudelleen kuvan etsimiseksi.
Mikromoottori (4) ei pysty kehittämään voimakasta voimaa (vääntömomenttia) akseliin, mutta sillä on korkea pyörimisnopeus. Muuntaaksemme suuren kulmanopeuden pienellä momentilla pieneksi suurella nopeudella, mikä on juuri sitä, mitä tarvitsemme, meidän tulisi käyttää vaihteistoa. Vaihteistoa edustavat vaihteet, jotka yhdistävät moottorin akselin ja ulostuloakselin (5). Vaihde, jossa on vähemmän hampaita, ajaa hammaspyörää, jossa on enemmän. tästä nopeus laskee mutta momentti kasvaa.Vaihteiston toimintaperiaatteen saa selvemmin käsittämään ottamalla servokäytön ja yrittämällä kääntää servovipua. Vaikea? Tietenkin, koska takapuolella vaihdelaatikko muuttuu kertoimeksi, mekaaniseksi laitteeksi, joka päinvastoin muuntaa alhaisen nopeuden voimakkaan hetken nopean heikon hetken.
Servojen tärkeimmät ominaisuudet:
. Akselin voima
Akseliin kohdistuva voima, joka tunnetaan myös nimellä momentti, on yksi tärkeimmistä servokäytön indikaattoreista ja mitataan kg / cm. Tekniset tiedot ilmoitetaan yleensä kahdelle syöttöjännitevaihtoehdolle, useimmiten 4,8 V:lle ja 6,0 V:lle.
Momentti 15 kg/cm tarkoittaa, että servo pystyy pitämään keinutuolin paikallaan vaakasuorassa asennossa 1 cm:n olkapää ja 15 kg:n kuorman ripustettuna siihen tai pitämään keinutuolissa 1 kg:n kuorman. tuoli, jossa olkapää 15 cm.
Keinuvarren pituus on kääntäen verrannollinen kantavan kuorman massaan. Tälle ajolle, jonka pituus on 2 cm, saamme 7,5 kg ja vähentämällä vivun pituuden 0,5 cm: iin saamme jopa 30 kg
. kääntymisnopeus
Kääntönopeus on myös yksi tärkeimmistä ominaisuuksista. On tapana ilmoittaa se aikaekvivalenttina, joka tarvitaan servon ulostuloakselin asennon muuttamiseksi 60 °. Tämä ominaisuus on myös useimmiten tarkoitettu 4,8 V:lle ja 6,0 V:lle.
Esimerkiksi ominaisuus 0,13 s/60° tarkoittaa, että tämän servon käännös 60° voidaan suorittaa vähintään 0,13 sekunnissa.
. Servo tyyppi
Digitaalinen tai analoginen
. Syöttöjännite
Useimmat hobby-servot vaihtelevat välillä 4,8 V - 7,2 V
. Pyörimiskulma
Tämä on suurin kulma, jonka ulostuloakseli voi kääntyä. Pyörimiskulmien servokäytöt ovat pääasiassa 180° ja 360°.
. Servo pyörii jatkuvasti
Servokäytöt ja jatkuva pyöriminen tuotetaan. Jos sellaista ei ole mahdollista ostaa, mutta se on erittäin tarpeellista, voit tehdä tavallisen servon uudelleen.
. Vähentimen tyyppi
Servovaihteistot valmistetaan metallista, hiilikuidusta, muovista tai ne kootaan metalli- ja muovivaihteista.

Muovihammaspyörät kestävät huonosti kuormitusta ja iskuja, mutta ne kuluvat hyvin vähän. Hiilikuitu on vahvempaa kuin muovi, mutta paljon kalliimpaa. Metallivaihteet kestävät raskaita kuormia, iskuja, putoamista, mutta tämän tyyppisillä vaihteilla on suurin kuluminen.
Haluaisin myös huomata, että eri servojen ulostuloakseli on asennettu eri tavalla. Useimmissa akseli liukuu hihoissa, tehokkaammissa servoissa käytetään jo kuulalaakereita.

Servokäyttöjen koot:
Servokäytöt on jaettu 4 pääkokoon. Seuraavat ovat servotyypit painoineen ja mitoineen. Eri servojen mitat voivat poiketa hieman alla olevista.
Mikro: 24mm x 12mm x 24mm, paino: 8-10g.
Mini: 30mm x 15mm x 35mm, paino 23-25g.
Vakio: 40mm x 20mm x 37mm, Paino: 50-80g.
Jättiläinen: 49x25x40mm, paino 50-90g.
Sarja servoista:
Osta Venäjältä
Tällä oppitunnilla tarkastelemme laitetta ja servojen toimintaperiaatetta. Analysoidaan kahta yksinkertaista luonnosta servon ohjaamiseksi Arduinon potentiometrillä. Opimme myös uusia komentoja C++-ohjelmointikielellä − servo.write, servo.read, servo.attach ja opi yhdistämään kirjasto luonnoksilla ohjaamaan servoja ja muita laitteita Arduinon kautta.
Servomoottorilaite (servo)
Servokäyttö (servomoottori) on tärkeä elementti erilaisten robottien ja mekanismien suunnittelussa. Tämä on tarkka esiintyjä, jolla on palaute, jonka avulla voit ohjata tarkasti mekanismien liikkeitä. Toisin sanoen vastaanottaessaan ohjaussignaalin arvon sisääntulossa servomoottori pyrkii säilyttämään tämän arvon toimilaitteensa lähdössä.
Servokäyttöjä käytetään laajalti simuloimaan robottien mekaanisia liikkeitä. Servokäyttö koostuu anturista (nopeus, asento jne.), mekaanisen järjestelmän ohjausyksiköstä ja elektronisesta piiristä. Laitteen supistimet (vaihteet) on valmistettu metallista, hiilikuidusta tai muovista. Servomoottorin muoviset vaihteet eivät kestä raskaita kuormia ja iskuja.
Servomoottorissa on sisäänrakennettu potentiometri, joka on kytketty lähtöakseliin. Akselia kääntämällä servo muuttaa potentiometrin jännitearvoa. Levy analysoi tulosignaalin jännitteen ja vertaa sitä potentiometrin jännitteeseen, eron perusteella moottori pyörii, kunnes se tasoittaa jännitteen lähdössä ja potentiometrissä.
 Servoohjaus pulssinleveysmodulaatiolla
Servoohjaus pulssinleveysmodulaatiolla Kuinka yhdistää servo Arduinoon
Arduinon servon kytkentäkaavio on yleensä seuraava: musta johto GND:hen, punainen johto 5V:iin, oranssi/keltainen johto analogiseen PWM (pulssin leveysmodulaatio) -nastaan. Arduinon servo-ohjaus on melko yksinkertaista, mutta servomoottorit voidaan kääntää 180 ° ja 360 ° kiertokulmissa, mikä tulee ottaa huomioon robotiikassa.
Oppituntia varten tarvitsemme seuraavat tiedot:
- Arduino Uno / Arduino Nano / Arduino Mega aluksella;
- Leipä aluksella;
- USB kaapeli;
- 1 servo;
- 1 potentiometri;
- Johdot "isä-isä" ja "isä-äiti".

Ensimmäisessä luonnoksessa tarkastellaan kuinka ohjata servoa Arduinossa myservo.write(0)-komennolla. Käytämme myös Servo.h-standardikirjastoa. Liitä servo Arduino-korttiin yllä olevan kuvan kaavion mukaisesti ja lataa valmis luonnos. Void loop() -menettelyssä asetamme yksinkertaisesti servolle halutun kiertokulman ja ajan, joka kestää odottaa seuraavaan kiertoon.
Arduino servo luonnos
#sisältääSelitykset koodille:
- Servo.h:n standardikirjasto sisältää joukon lisäkomentoja, jotka voivat yksinkertaistaa luonnosta huomattavasti;
- Servo-muuttuja on välttämätön, jotta se ei hämmenny, kun kytket useita servoja Arduinoon. Annamme jokaiselle asemalle oman nimensä;
- Servo1.attach(10) -komento sitoo taajuusmuuttajan analogiseen lähtöön 10.
- Ohjelmassa käännetään taajuusmuuttajaa 0-90-180 astetta ja palataan alkuasentoon, koska tyhjäsilmukkamenettely toistetaan syklisesti.
Servoohjaus potentiometrillä
 Servon ja potentiometrin yhdistäminen Arduino Unoon
Servon ja potentiometrin yhdistäminen Arduino Unoon Arduino mahdollistaa paitsi ohjauksen myös lukemisen servosta. Myservo.read(0) -komento lukee nykyisen servoakselin kulman ja näemme sen porttinäytössä. Esitetään monimutkaisempi esimerkki servon ohjaamisesta potentiometrillä Arduinossa. Kokoa potentiometripiiri ja lataa servon ohjauspiirros.
Piirrä servo potentiometrillä
#sisältääSelitykset koodille:
- Tällä kertaa nimesimme luonnoksen servon servoksi;
- Komento servo.write(analogRead(A0)/4) siirtää arvot servoakselille - jaamme potentiometristä vastaanotetun jännitteen neljällä ja lähetämme tämän arvon servolle.
- Serial.println (servo.read(10)) -komento lukee servoakselin kulman arvon ja lähettää sen porttimonitoriin.
Servomoottoreita käytetään usein erilaisissa Arduino-projekteissa eri toimintoihin: kääntörakenteisiin, mekanismien liikkuviin osiin. Koska servomoottori pyrkii jatkuvasti ylläpitämään tiettyä pyörimiskulmaa, varaudu lisääntyneeseen virrankulutukseen. Tämä on erityisen herkkä autonomisissa roboteissa, jotka toimivat paristoilla tai akuilla.
Lue myös usein:

Nykyaikaiset korkean teknologian laitteet sisältävät rakenneosien käytön, joiden avulla voit tehdä jatkuvia dynaamisia liikkeitä akselin pyörimiskulman jatkuvalla valvonnalla sekä mahdollisuuden ohjata sähkömekaanisten laitteiden nopeuksia. Tällaisten tehtävien koko kompleksi voidaan ratkaista servomoottorien avulla. Ne ovat sähköinen käyttöjärjestelmä, jonka avulla voit ohjata tehokkaasti vaaditulla alueella nopeuksia. Tällaisten laitteiden käyttö mahdollistaa prosessien säännöllisen toiston suurella taajuudella. Servomoottorit ovat innovatiivinen versio sähkökäytöstä, joten niitä käytetään laajasti koneenrakennuksessa ja muilla teollisuudenaloilla. Tällaisissa laitteissa yhdistyvät korkea hyötysuhde ja alhainen melutaso.
Servomoottorilaite
Servomoottorin suunnittelu vaatii seuraavat elementit:
- roottori;
- staattori;
- Kytkentään tarkoitetut komponentit (pistokkeet tai liitäntäkotelot);
- Palaute-anturi (enkooderi);
- Hallinta-, valvonta- ja korjaussolmu;
- On ja off -järjestelmä;
- Kotelot (kotelotyyppisissä moottoreissa)
Suurin rakenteellinen ero tarkasteltavien laitteiden ja perinteisten DC- ja AC-moottoreiden välillä, jotka on varustettu harjoilla tai ilman niitä, on kyky ohjata niitä muuttamalla roottorin nopeutta, vääntömomenttia ja asentoa.
Moottori voidaan käynnistää ja sammuttaa järjestelmän avulla mekaaninen(vastukset, potentiometrit jne.) tai elektroninen(mikroprosessori) tyyppi. Se perustuu periaatteeseen, jossa verrataan takaisinkytkentäanturin tietoja ja asetettua arvoa releen kautta laitteeseen syötettyyn jännitteeseen. Korkean teknologian järjestelmissä otetaan huomioon myös roottorin hitaus, mikä varmistaa sen tasaisen kiihtyvyyden ja hidastumisen.
Käsitteellisesti kaikki servomoottorit voidaan luokitella tarkkuuspaikannusjärjestelmien, koneiden ja laitteiden suuritehoisiksi käyttöjärjestelmille. Servomoottorin päätehtävänä on sijoittaa toimilaite tarkasti haluttuun paikkaan avaruudessa.
Toimintaperiaate

Servomoottoreiden toiminnan päänäkökohta on niiden toimintaolosuhteet järjestelmässä G-koodit, eli erikoisohjelman sisältämät ohjauskomennot. Pohditaan tätä asiaa esimerkin avulla CNC, silloin servomoottorit toimivat yhdessä muuntimien kanssa, jotka muuttavat jännitearvoa ankkurissa tai moottorin jännityskäämissä tulojännitetason perusteella. Yleensä koko järjestelmää ohjataan CNC-telineellä. Vastaanottaessaan telineestä käskyn kulkea tietty matka X-koordinaattiakselia pitkin, telineen digitaali-analogimuuntimen alayksikössä syntyy tietty määrä jännitettä, joka välitetään antamaan virtaa määritetyn koordinaatin taajuusmuuttajalle. Servomoottorissa alkaa johtoruuvin pyöriminen, johon liitetään kooderi ja koneen toimeenpaneva runko. Ensimmäisessä generoidaan pulsseja, jotka teline laskee. Ohjelma tarjoaa, että tietty määrä enkooderista tulevia signaaleja vastaa tiettyä suoritusmekanismin kulkuetäisyyttä. Kun tarvittava määrä pulsseja vastaanotetaan, analogimuunnin antaa nollalähtöjännitteen ja servomoottori pysähtyy. Jos koneen työosien ulkoinen vaikutus siirtyy, kooderiin muodostuu pulssi, jonka teline laskee, taajuusmuuttajaan syötetään epäsovitusjännite ja moottorin ankkuri pyörii, kunnes epäsopivuusarvo on nolla. saatu. Tuloksena on koneen työelementin tarkka pitäminen tietyssä asennossa.
Servomoottoreiden lajikkeet
Kuten muitakin laitteita, servomoottoreita on saatavana useissa versioissa. Tämän tyyppisiä tuotteita ovat:
- Keräilijä;
- Keräimetön.
Laitteita voidaan käyttää sekä tasa- että vaihtovirralla. AC-servomoottorit ovat suhteellisen halpoja. Tuotteita on markkinoilla myös asynkronisina ja synkronisina versioina. Synkronisessa versiossa tuotteen toiminnan aikana magneettikentän liike osuu yhteen roottorin pyörimisen kanssa, joten niiden suunta suhteessa staattoriin on sama. Asynkronisia laitteita ohjataan muuttamalla syöttövirran parametreja (vaihtamalla sen taajuutta invertterin avulla). Servomoottoreille, jotka toimivat tasavirralla, käytetään lyhennettä DC. Tämän tyyppisiä tuotteita käytetään useimmiten jatkuvaan käyttöön suunnitelluissa laitteissa, koska niille on ominaista suurempi vakaus käytön aikana.
Servomoottorien tekniset tiedot
Synkronisten ja asynkronisten moottoreiden suorituskykyominaisuudet ovat hieman erilaiset.
| Synkroniset servomoottorit | Asynkroniset servomoottorit |
| Niillä on korkea työdynamiikka (siirtymänopeus staattisesta tilaan dynaamiseen). | Heillä on keski- ja korkea dynamiikka työssä. |
| Suurten inertiakuormitusmomenttien aikana ne ovat kohtalaisen hyvin säädeltyjä. | Inertiatyyppisten kuormien huippuhetkillä ne ovat hyvin viritetty. |
| Kestää suuria ylikuormituksia (jopa 6 Mn, riippuen yksikön tyypistä). | Kyky ylikuormittaa lähestyy kolminkertaista arvoa. |
| Niillä on korkea sallitun lämpökuormituksen raja käytettäessä pitkään koko akselin nopeusalueella. | Moottorit kestävät suuria lämpökuormia, joiden taso riippuu akselin pyörimisnopeudesta. |
| Tuote jäähdytetään konvektiotekniikalla sekä erityisillä jäähdytyselementeillä tai lämpösäteilyllä. | Mekanismin osien jäähdytys suoritetaan akselille asetetulla juoksupyörällä tai voimalla. |
| Laadukas akselin nopeudensäätö. | Akselin kierroslukua säädetään laadukkaasti. |
| Pitkäaikainen käyttö käynnistysmomentilla alhaisilla nopeuksilla on mahdollista. | Suuret lämpökuormat tekevät pitkän käytön matalilla nopeuksilla mahdotonta ilman pakkojäähdytystä. |
| Muuntimen (ominaisuuksista riippuen) avulla voit ohjata nopeutta välillä 1 - 5000 tai jopa enemmän. | Nopeutta ohjaa muuntaja, jonka hyötysuhde on 1-5000 ja enemmän. |
| Alhaisilla nopeuksilla havaitaan vääntömomentin aaltoilua. | Käytön aikana vääntömomentin aaltoilua ei ole käytännössä lainkaan. |
Servomoottorien käyttöalueet
Korkean dynamiikkansa, erinomaisen paikannustarkkuutensa ja servomoottorien ylikuormituksenkestävyyden ansiosta niitä käytetään useilla eri aloilla. Suurin osa näistä tuotteista käytetään terästeollisuudessa, pituusleikkureiden, ekstruudereiden, muovin ruiskuvalukoneiden, paino- ja pakkauslaitteiden valmistuksessa, elintarviketeollisuudessa ja juomateollisuudessa. Laitteet ovat myös olennainen osa CNC-koneita, puristus- ja leimauslaitteita, autojen tuotantolinjoja jne. pääsuunta servomoottorien sovelluksia ovat syöttökäytöt ja asentokone digitaaliset ohjausjärjestelmät.
Servojen liittäminen

Kun kytket servomoottoria, varmista ensin, että virtakaapelit on kytketty oikein. Servomoottoreissa on kaksi johtosarjaa. Virta (virta) ja johdot kooderista. Paketissa on 3 virtajohtoa, ne on kytketty ohjaimeen. Anturin johdot on kytketty ohjaimen COM-porttiin. Ruoan tyyppi ja sen arvo riippuu tuotteen tyypistä.
Pienissä servoissa on yleensä 3 johtoa. 1 johto on yleinen, 1 on positiivinen ja 3 on signaalijohto, nopeusanturista. Tällainen virtalähdejärjestelmä on yleinen hitaille, pienitehoisille servoille, joiden suunnittelussa on vaihdelaatikko.
Ohjaussignaalien lähettämiseen on suositeltavaa käyttää suojattuja kierrettyjä johtimia. Sähkömagneettisten kenttien aiheuttamien häiriöiden poissulkemiseksi virtajohtoa ja ohjausjohtoja ei tarvitse asettaa vierekkäin. Niiden tulisi sijaita vähintään kolmenkymmenen senttimetrin etäisyydellä.
Servomoottorien edut ja haitat
Servomoottorit ovat hiljaisia ja toimivat tasaisesti. Nämä ovat luotettavia ja ongelmattomia tuotteita, minkä ansiosta niitä käytetään laajasti kriittisten toimilaitteiden luomisessa. Suuri nopeus ja liiketarkkuus voidaan saavuttaa myös alhaisilla nopeuksilla. Käyttäjä voi valita tällaisen moottorin tulevista ratkaistavista tehtävistä riippuen. Haittoja ovat moduulin korkeat kustannukset sekä sen kokoonpanon monimutkaisuus. Servomoottoreiden tuotanto vaatii korkean teknologian teollisuuslaitteita.
Tällä tavalla käyttäjät voivat ostaa servomoottoreita, jotka sopivat parhaiten heidän tulevan toimintansa olosuhteisiin, jolloin syntyy erittäin luotettava ja toimiva toimilaite.
Monet ihmiset kysyvät kysymyksen: servo - mikä se on? Klassinen servorakenne sisältää moottorin, asentoanturin ja kolmisilmukaisen ohjausjärjestelmän (asennon, nopeuden ja virran säätö).
Sana "servo" on latinalaista alkuperää "servus", käännetty kirjaimellisesti "orjaksi", "avustajaksi", "palvelijaksi".
Konepajateollisuudessa laitteet toimivat apukomponentteina (työstökoneen syöttökäyttö, robotti jne.). Nykyään tilanne on kuitenkin muuttunut, ja servon päätarkoitus on toteutuksessa servomekanismien alalla.
Servon asennus on perusteltua siinä tapauksessa, että perinteiset eivät säätele riittävästi työn tarkkuutta.

Korkealaatuisten instrumenttien käyttö on välttämätöntä korkean suorituskyvyn omaavissa laitteissa.
Tässä artikkelissa puhutaan servosta, mitä se on ja miten se toimii.
Laitteen käyttöalueet
Nykymaailmassa, kun automaatio on ottanut vahvan aseman kaikilla koneenrakennuksen osa-alueilla, kaikkien mekanismien suunnittelu on selkeästi yhtenäistynyt. Tässä tapauksessa käytetään nykyaikaisia yksittäisiä asemia.
Jotta ymmärrät, mikä servo on, sinun on tiedettävä laitteen laajuus.
Laitteet sisältävät tarkkuusrakenteita nopeuden ylläpitämiseksi ja työstökoneet suurella tarkkuudella. Ne asennetaan porauslaitteisiin, erilaisiin kuljetusjärjestelmiin ja apumekanismeihin.
Laitteita käytetään laajimmin seuraavilla alueilla:
- paperin ja pakkausten tuotanto;
- metallilevyjen tuotanto;
- Materiaalinkäsittely;
- kuljetusvälineiden tuotanto;
- rakennusmateriaalien tuotanto.
Servo auton tavaratilaan
Auton tavaratilan servoja on monia malleja eri valmistajilta. Harkitse tällaisen laitteen toimivuutta kotimaisen valmistajan Avtozebran tavaratilan servona. Laite on suunniteltu venäläisille autoille, mutta ei vain. Sitä voidaan käyttää esimerkiksi Renault Logan -autossa.

Käyttäjien arvioiden mukaan tämä muotoilu on kätevä. Sen avulla voit avata ja sulkea tavaratilan poistumatta autosta.
Laitetta ohjataan painikkeella, joka on asennettu matkustamoon tai sisään
Syy laitteen laajaan käyttöön
Syynä servokäyttöjen säännölliseen käyttöön oli:
- mahdollisuus saada ohjaus, jolle on ominaista korkea tarkkuus ja vakaa toiminta;
- laaja valikoima nopeudensäätöä;
- korkea kestävyys häiriöille;
- laitteen pieni koko ja paino.
Servon toimintaperiaate
Miten laite toimii? Servo säätelee kohdetta yhden tai useamman järjestelmäsignaalin palautteen perusteella. Laitteen lähtöilmaisin tulee sisääntuloon, jossa sitä verrataan asetustoimintoon.
Liikkeen ominaisuudet
Servokäyttölaitteella on kaksi pääominaisuutta:
- kyky lisätä tehoa;
- antaa palautetietoja.

Vahvistusta tarvitaan siihen tarkoitukseen, että lähdössä tarvittava energia on erittäin korkea (tulee ulkoisesta lähteestä), ja tulossa sen indikaattori on merkityksetön.
Palaute ei ole muuta kuin suljettu piiri, jossa signaalit eivät täsmää tulossa ja lähdössä. Tätä prosessia käytetään hallintaan.
Tästä seuraa johtopäätös: eteenpäin suunnattu piiri toimii energian lähettimenä ja päinvastaisessa suunnassa ohjaustarkkuutta varten tarvittavan tiedon välittäjänä.
Virtalähde ja laiteliittimien liitäntä
Servossa, joka soveltuu RC-kokoonpanoihin, on tyypillisesti kolme johtoa:
- Signalointi. Sen kautta lähetetään ohjauspulssi. Yleensä lanka on väriltään valkoinen, keltainen tai punainen.
- Ruokinta. Sen virran merkkivalo on 4,8 - 6 V. Usein tämä on punainen johto.
- Maadoitus. Lanka on musta tai ruskea.

Toimilaitteen mitat
Aggregaatit on jaettu kolmeen luokkaan:
- mikroasemat;
- vakiomuutokset;
- suuria laitteita.
Servoja on muitakin mittoja, mutta edellä mainitut tyypit muodostavat 95% kaikista laitteista.
Tuotteen tärkeimmät ominaisuudet
Servon toiminnalle on ominaista kaksi pääindikaattoria: pyörimisnopeus ja akseliin kohdistuva voima. Ensimmäinen arvo toimii ajan indikaattorina, joka mitataan sekunneissa. Voima mitataan kg / cm, eli millaisen voiman mekanismi kehittää pyörimiskeskipisteestä.

Yleensä tämä parametri riippuu laitteen päätarkoituksesta ja vasta sitten vaihteiston vaihteiden lukumäärästä ja laitteessa käytettävistä solmuista.
Kuten jo mainittiin, nyt valmistetaan mekanismeja, jotka toimivat 4,8-6 V:n syöttöjännitteellä. Useimmiten tämä luku on 6 V. Kaikkia malleja ei kuitenkaan ole suunniteltu laajalle jännitealueelle. Joskus servomoottori toimii vain 4,8 V:lla tai vain 6 V:lla (jälkimmäiset kokoonpanot ovat erittäin harvinaisia).

Analogiset ja digitaaliset modifikaatiot
Muutama vuosi sitten kaikki servopiirit olivat analogisia. Nyt on myös digitaalisia malleja. Mitä eroa heidän työssään on? Siirrytään virallisiin tietoihin.
Futaban raportin mukaan servokäytöt ovat viimeisen vuosikymmenen aikana tulleet teknisesti entistä paremmiksi, samoin kuin pieni koko, suuri pyörimisnopeus ja vääntöelementit.
Viimeisin kehityskierros on digitaalisen laitteen ilmaantuminen. Näillä yksiköillä on merkittäviä etuja jopa kollektorityyppisiin moottoreihin verrattuna. Vaikka on joitain huonoja puolia.
Ulkoisesti analogisia ja digitaalisia laitteita ei voi erottaa toisistaan. Erot korjataan vain laitelevyissä. Digitaalisessa yksikössä olevan mikropiirin sijasta näet mikroprosessorin, joka analysoi vastaanottimen signaalin. Hän ohjaa moottoria.
On täysin väärin väittää, että analogiset ja digitaaliset modifikaatiot ovat toiminnaltaan pohjimmiltaan erilaisia. Niissä voi olla samat moottorit, mekanismit ja potentiometrit.
Suurin ero on vastaanottimen ja moottorin ohjauksen saapuvan signaalin käsittelymenetelmä. Molemmat servot vastaanottavat saman tehosignaalin radiovastaanottimesta.
Siten käy selväksi, servo, mikä se on?
Analogisen muunnoksen toimintaperiaate
Analogisessa muunnoksessa vastaanotettua signaalia verrataan servomoottorin senhetkiseen asemaan, jonka jälkeen vahvistinsignaali lähetetään moottorille, jolloin moottori siirtyy määritettyyn asentoon Prosessitaajuuden ilmaisin on 50 kertaa sekunnissa. Tämä on pienin vasteaika. Jos hylkäät lähettimen kahvan, servoon alkaa virrata lyhyitä pulsseja, joiden välinen aika on 20 m / s. Pulssien välillä moottoriin ei pääse mitään, ja ulkoiset vaikutukset voivat muuttaa laitteen toimintaa mihin tahansa suuntaan. Tätä aikaväliä kutsutaan "kuolleeksi vyöhykkeeksi".
Kuinka digitaalinen suunnittelu toimii
Digitaalisissa laitteissa käytetään erityistä prosessoria, joka toimii korkeilla taajuuksilla. Se käsittelee vastaanottimen signaalin ja lähettää ohjauspulsseja moottorille nopeudella 300 kertaa sekunnissa. Koska taajuusosoitin on paljon korkeampi, reaktio on huomattavasti nopeampi ja pitää asennon paremmin. Tämä saa aikaan optimaalisen keskityksen ja korkean vääntötason. Mutta tämä menetelmä vaatii paljon energiaa, joten analogisessa liikkeessä käytetty akku purkautuu paljon nopeammin tässä mallissa.
Kuitenkin kaikki käyttäjät, jotka ovat joskus törmänneet digitaaliseen malliin, sanovat, että sen ero analogiseen malliin on niin merkittävä, että he eivät koskaan käyttäisi jälkimmäistä uudelleen.
Johtopäätös
Digitaaliset analogit ovat valintasi, jos tarvitset:
- korkeatasoinen ;
- "kuolleiden alueiden" vähimmäismäärä;
- tarkka paikannustaso;
- nopea vastaus komentoon;
- jatkuva voima akseliin käännettäessä;
- korkea tehotaso.
Nyt tiedät mikä servo on ja kuinka sitä käytetään.